Fish-inspired soft robot takes a deep dive
Dimitris TsakirisDe diepste gebieden van de oceanen blijven een van de minst verkende gebieden op aarde, ondanks hun aanzienlijke wetenschappelijke belang en de rijkdom aan levensvormen die erin leven.
Twee redenen hiervoor zijn de lage temperaturen en enorme drukken die op dergelijke diepten worden uitgeoefend, waardoor de verkenningsapparatuur zorgvuldig moet worden afgeschermd in hoogsterkte metalen of keramische kamers om deze te weerstaan. Dit maakt diepzee-verkenningsvaartuigen omvangrijk, duur en onhandelbaar, evenals moeilijk te ontwerpen, te vervaardigen en te vervoeren.
Maar een nieuwe kleine, zelfaangedreven onderwaterrobot in de vorm van een vis lijkt een alternatief te bieden. Volgens een recent artikel kon de robot het diepste deel van de Stille Oceaan bereiken – de Marianentrog – op een diepte van bijna 11 km (6,8 mijl).
De druk daar is meer dan duizend keer zo groot als die aan het oppervlak van de zee. Toch kunnen verschillende dieren, waaronder vissen, deze verbazingwekkende druk weerstaan en hebben ze zich aangepast aan het leven in dergelijke ongunstige omstandigheden. De morfologie en schedelstructuur van een van deze zeeorganismen, de hadal slakdolf, heeft naar verluidt de inspiratie geleverd voor het ontwerp van deze opmerkelijke robotzwemmer.

De belangrijkste doorbraak die deze aanzienlijke prestatie mogelijk maakte, was een speciaal ontworpen flexibel polymeerlichaam dat vervormt, zonder te breken, onder hoge druk. Het team van onderzoekers uit Hangzhou in China slaagde erin de gevoelige elektronische componenten die nodig zijn voor stroom, beweging en besturing in een beschermende siliconenmatrix in te bedden.
De elektronische componenten werden van elkaar gescheiden, in plaats van dicht op elkaar gepakt zoals gebruikelijk is, om ze beter bestand te maken tegen de druk, vergelijkbaar met de schedelbeenderen van de slakdolf.
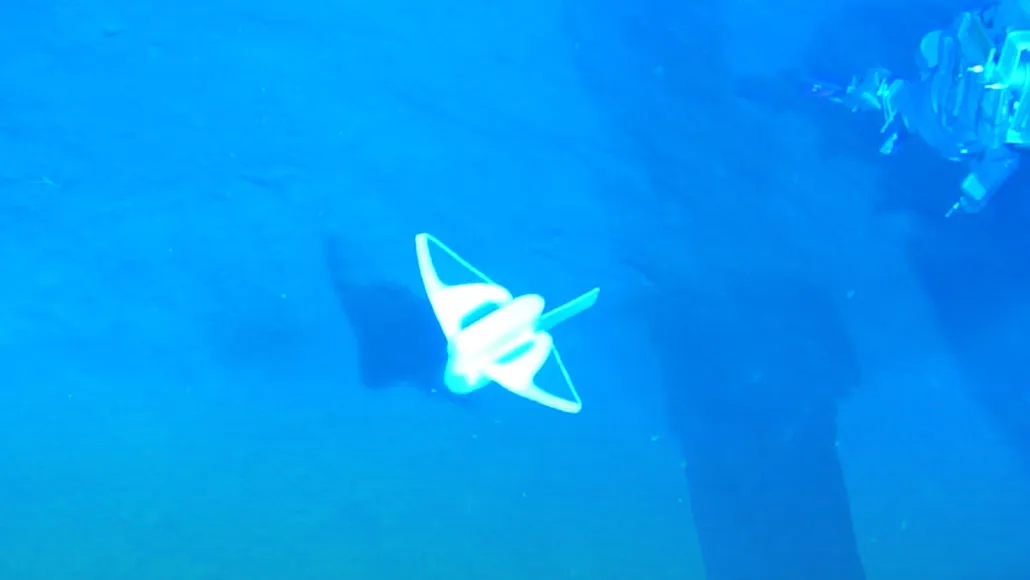
De robot lijkt ook op de slakdolf, met een langwerpig lichaam en staart, evenals twee grote zijvinnen gemaakt van dun silicone. De vinnen klappen om de kleine robot voort te stuwen, die slechts 22 cm (8,7 inch) lang is met een spanwijdte van 28 cm.
De vinnen worden niet bediend door starre motoren, maar door zachte kunstmatige spieren.
De vinnen worden niet aangedreven door starre motoren, maar door zachte kunstmatige spieren. De spieren bevatten diëlektrische elastomeren – een klasse van slimme materialen die samentrekken wanneer er elektrische spanning wordt aangelegd om grote bewegingen te creëren.
Schijfvormige diëlektrische elastomeerelementen creëren de vinbeweging die de robot voortstuwt, waarbij snelheden worden bereikt tot ongeveer een halve lichaamslengte per seconde (ongeveer 0,2 km/u), zelfs op aanzienlijke diepten.
Echter, dit type actuatoren – de onderdelen die een machine in beweging brengen – vereist een zeer hoge spanning. Een compacte hoogspanningsversterker vermenigvuldigt de spanning van de lithium-ionbatterij meer dan duizend keer om aan deze eis te voldoen, terwijl een infraroodontvanger afstandsbediening van de robot mogelijk maakt. De zachte vinnen en zachte actuatoren zijn zorgvuldig ontworpen om te overleven en goed te presteren bij de lage temperaturen en hoge drukken van de diepzeeomgeving.
Het team voerde uitgebreide computationele studies en laboratoriumtests uit van de voortstuwingsmethodologie en van hoe de elektronica presteert onder extreme druk. Vervolgens voerden ze vrij zwemmende veldtests uit, eerst in een diep meer, daarna in de Zuid-Chinese Zee op diepten van meer dan 3 km, voordat ze het in de Marianentrog inzetten.
Tijdens de Mariana-veldtests werd de robot gemonteerd op een diepzeelander, dus mocht hij niet vrij zwemmen. Maar hij was in staat om zijn klappende beweging vol te houden, zoals vastgelegd door de camera's van de lander, gedurende 45 minuten op een diepte van 10.900 meter.
Zachte robots
Deze diepzeezwemmer is een voorbeeld van een nieuwe generatie robots geïnspireerd door levende organismen, zowel dieren als planten. Ze worden gebouwd door gebruik te maken van de voordelen van flexibele materialen zoals siliconen en andere polymeren, gels of zelfs textiel.
Dit diepzee-zwemmende exemplaar is een voorbeeld van een nieuwe generatie robots geïnspireerd op levende organismen, zowel dieren als planten.
Deze robots kunnen buigen, meegeven en zich aanpassen als reactie op krachten uit hun omgeving, waardoor ze van nature veiliger zijn om naast mensen te werken in vergelijking met de typische starre industriële robots. Aan de andere kant kunnen hun ontwerp, aandrijving, detectie en besturing aanzienlijke uitdagingen opleveren, die de kern vormen van hun wetenschappelijke en technologische belangstelling.
Er is momenteel intense interdisciplinair onderzoeksactiviteit op dit nieuwe gebied, genaamd zachte robotica, wat leidt tot spannende innovatieve vooruitgangen voor een hele reeks gerelateerde toepassingen, variërend van landbouw tot geneeskunde en ruimtevaart. De Harvard Octobot is een voorbeeld van deze klasse robots, die onder andere een bron van inspiratie lijkt te zijn geweest voor het ontwerp en de technologieën die in deze diepzeerobot zijn toegepast.
De huidige versie van de diepzeezwemmer lijkt relatief langzaam te zijn, niet erg gemakkelijk te manoeuvreren en mogelijk niet bestand tegen de sterke onderwaterstromingen die zijn koers zouden verstoren bij het volgen van een gewenst pad. Zijn ontwerpers lijken echter al plannen te hebben voor verdere verbeteringen die hem wendbaarder, efficiënter en slimmer zullen maken.
Ondanks eventuele tekortkomingen moeten we de ontwerpprincipes van robots en technologische vooruitgang die tot zo'n dramatische demonstratie hebben geleid, niet onderschatten.
Geschreven door Dimitris Tsakiris, hoofddocent Intelligente Robotica, Aberystwyth University. Dit artikel is opnieuw gepubliceerd van The Conversation onder een Creative Commons-licentie. Lees het originele artikel.

Comments (0)
Share your thoughts and join the technology debate!
No comments yet
Be the first to share your thoughts!